About:
Exploring new approaches to machine hosted
neural-network simulation, and the science
behind them.
Your moderator:
John Repici
A programmer who is obsessed with giving experimenters
a better environment for developing biologically-guided
neural network designs. Author of
an introductory book on the subject titled:
"Netlab Loligo: New Approaches to Neural Network
Simulation". BOOK REVIEWERS ARE NEEDED!
Can you help?
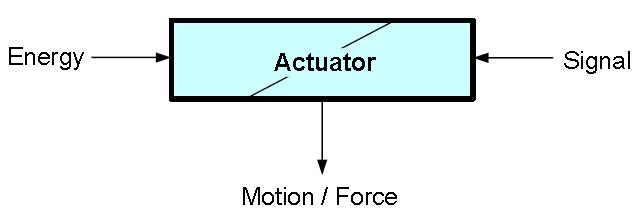
It's always about the actuators these days, isn't it? In the broadest sense, actuators are anything that can convert a signal into a physical motion or force. In a more practical sense, actuators are the “muscles” used to provide controlled motion to robotic systems. Robots and adaptive systems are able to manipulate physical objects around them by controlling the motion of actuators in specific ways. Likewise, they use actuators to manipulate themselves, as objects, relative to the objects around them.
This article explores the subject of actuators at a very introductory level. It is written by a programmer, who is trying to learn some of the details about what the robotics folk are up to, in order to organize those details into a more coherent understanding.
Actuators come in many forms. Two primary actuator types are rotary, and linear. An example of a rotary actuator is an electric motor, which is an actuator that converts an electrical signal into a rotating motion of its shaft. Linear actuators, on the other hand, produce a non-rotary motion, such as a sliding motion, or piston motion in response to an input signal. The distinction is somewhat abstract, however, as a linear actuator can be built using a normal rotary motor as its basis, and vice verse. In each case, the initial motion produced is mechanically converted to the other motion-type. Also, there are overlapping semantics, such that a well known linear actuator, such as the voice-coil in a loud-speaker, would seldom be referred to as an actuator.
Interestingly, for some applications, the mechanical conversion is from a natural linear motion, into a rotational motion. The internal combustion engine in your automobile is a good example of this type of conversion, which converts the up-and-down motion generated by the engine's pistons, into tire rotation.
This entry will deal, primarily, with linear actuators. A human muscle is a good example of a linear actuator, because it converts a signal from your brain directly into a linear (back-and-forth) motion.
Linear actuators are often built by converting the rotary motion produced by a traditional rotary motor into a linear (back-and-forth) motion. These will often use a worm- or screw-gear, or some form of pulley system, to convert the motor's rotational motion into linear motion.
There are also many actuator types which convert signals directly to linear motion. Perhaps the simplest, and one of the earliest forms of such an actuator is the solenoid. A solenoid employs a ferrous, or magnetic rod, which moves in and out of a coil of wire. As a current is passed through the coil, a magnetic force proportional to the current is produced in the coil. This draws the rod inward toward the coil, or pushes it outward, away from the coil (depending on the direction of the current and magnetization of the rod).
A voice coil in a loud-speaker is another example of a naturally linear actuator, which works on a similar principal as a solenoid (i.e., it uses magnetic force). In this case, however, the moving voice-coil is placed in a strong magnetic field between two opposite magnetic poles. It moves through the magnetic flux based on the Lorentz force. Lorentz forces are the forces created by the circular magnetic flux produced around an energized wire. The induced flux around the wire (based on the amount of current moving through the wire) interacts with the magnetic lines of force between the two poles of a magnet. This causes the coil to move.
A similar principal is employed in magneto-electric linear motors. These employ many coils (or magnets) along a track in order to facilitate very long linear displacements. This type of linear actuator is, in fact, the principal behind (or should I say "underlying") the forward propulsion system in mag-lev trains. In this case, the displacements can be measured in miles (or kilometers).
A piezo electric element can be considered a linear actuator because it converts a signal into a motion (a displacement, or “strain”). It is a very small displacement, but it is nonetheless a linear motion. The pros of this kind of actuator include reliability, power-efficiency, and repeatability. The down side, of course, is their very short displacement. Even the best displacements are measured in less than 10% of total length.
A new kind of piezo-actuator uses many piezo elements to move a rod back and forth by essentially walking the rod under them. This allows much greater displacements, but adds complexity, which may reduce reliability.
Actuators can operate by moving pistons with gas, such as air pressure (pneumatics), or fluid pressure (hydraulics). These are sometimes referred to as fluid-based actuators. This is true, even for the pneumatic (gas based) systems.
Air-Muscles: A Special Pneumatic Category — Though not new, air-muscles are coming back into favor among many who design with pneumatic actuator systems. Part of the reason for this is the relatively recent availability of huge amounts of cheap processing power, which can be used to process all types of feedback from many different modalities. This reduces the need for rigidity and repeatability at the physical (dead reckoning) level. Air muscles work by inflating a tube (essentially acting as a balloon) inside a braided steal, or plastic sleeve. This causes the sleeve to contract in the perpendicular direction of the balloon expansion, producing a linear back and forth motion.
The down-side to pneumatics and hydraulics — Whether air or fluid, one large down-side to this type of actuator is the need to have another actuator in the control path. Specifically, in order to make a pneumatic or hydraulic cylinder move, you need to first be able to open and close a valve that supplies air or liquid to it. The opening and closing of that valve is where your electrical signal will first be converted to a motion. Because air and fluid don't move anywhere near as quickly as electrons, there will also be a non-trivial delay added in the path (on the order of a few tens of milliseconds or more). Not at all good for dexterity.
Don't be misdirected - The magic is happening at the valve actuators. The art and science of converting fluid pressure into motion has been around for many centuries, and it is fairly stable. New materials are, of course, continuing to improve reliability of the components used, but when it comes to designing a better robotic system the place to keep your focus, is squarely on the capabilities of the valves. The valves provide air or liquid to the actuator in response to your electrical command-signal.
Solenoid valves have been the norm. They are either entirely opened or entirely closed. They have been useful for many automation tasks, and are well known and easy to come by. The problem with many of these valves is that their all-or-nothing character translates into quick, jerky movements. Some control over a range of motion can be achieved by pulsing the valve, opening and closing it quickly. This is not that good for a whole host of reasons.
Proportional Control Valves - Or simply “proportional valves” are used to adjust the amount of pressure to the actuator over a continuous range, from very little to a lot. These can be the chattering pulsed variety alluded to above, or they can be modern servo-controlled valves that include positional feedback for accurately opening the valve by a specified amount. Those that open and close the valve in a truly (physically) proportional way, can be controlled by an analog voltage-, or current-level, or they can be controlled by a digital value (where more bits equals more discrete steps of openness).
The capabilities of artificial muscles are often compared to human muscles, and that's not a bad metric, as long as you don't consider it the ultimate metric.
Large hydraulic systems used in earth-moving equipment for example, outstrip human muscles in strength, but may not be the best choice for fast dexterous responses on, say, finer-sized manipulators. Part of this is certainly in the added few-millisecond delay that will be needed to operate a valve with your signal, which in turn, controls the supply of air or fluid pressure to the actual actuator.
Human muscles (at least the skeletal muscles used to manipulate the outside world) have employed a single mechanism for both the large, approximated movements (e.g., the arm muscles), as well as for the small, intricate motions (e.g., the fingers at the end of the arms). The artificial mechanism that looks most like the actin-filament system used by human muscles is the new long-displacement (actually, long-travel), high-resolution piezo system (see resources section below). This operates by employing a bunch of tiny piezoelectric elements that are positioned against a moving bar. The piezoelectric elements act like tiny feet that "walk" the bar back and forth underneath them.
I'll just start to throw out some of the actuator capabilities that may be important in a world where feedback is increasingly employed in robotic, and adaptive-robotic systems. That is, in a world where the old standard of repeatability is becoming increasingly less important. Can you think of more?
Strength and range of strength (obvious, included for completeness)
Place-holding characteristics (if any).
Displacement (percentage difference between full contract, and extend)
Dexterity (whatever that is)
Speed off the mark (initial response delay)
Range of speed (slow to fast)
Accuracy over a range of speeds and loads
Smoothness of motion over range of speed and range of load
Smoothness of the range itself (how many steps of continuous change).
Energy efficiency and heat dissipation
Operating conditions: temperature range, humidity, gas- or water-proof, etc.
I wonder if anybody knows of a workable (i.e., "implementable") definition of dexterity?
Servos are sometimes called “servo-motors,” and the word servo is often used as a prefix in other contexts as well. When you combine an actuator [1] with a position, force, speed, or other, sensor you have the makings of a servo. The feedback, which allows the control circuit to specify the amount of sensed signal, is sometimes called servo-feedback.
If you combine a motorized actuator with position feedback you have the peanut butter and jelly of the hobby robotics, and RC world. Now, you have an actuator that will do more than simply convert your signal into motion/force. The addition of the position-sensor in a servo configuration gives you an actuator that will accept your signal representing a position, and turn it into an actual position of the actuator over its displacement.
In practice, the word "Servo" has become strongly associated with a fairly specific, and semi-standardized electronic component, which provides an actuator and position-sensor combination encapsulated inside a single unit. Within this more narrow practical perspective there are only a handful of manufacturers of these units. The electrical signaling for them is fairly standardized, and they would be interchangeable, except that there may be small differences in connector configurations between them. These differences are not insurmountable though, and there are people on the web who can show you how to use an exacto-knife to modify the connectors, and perhaps alter the pin-outs, in order to make them plug-compatible across different manufacturers. For more information on servos, and these techniques, see the link to the tutorials listed in the Sources and Resources section below.
Upside: They all have the exact same PWM signaling scheme for positioning, though their connectors may differ slightly[2].
One downside of these hobby robotic servos is that they do not provide an output signal to indicate their actual position. That is, the feedback is entirely internal. There are ways to hack them, however, in order to break out the information from their internal position sensor.
A much more severe problem is that, while they let you specify position using PWM, they move at a constant speed to each new position.
Third, problems are also imparted because of their inability to specify force. Biological skeletal muscles are often called upon to exert a force to varying degrees, rather than move an object to a pre-set position. While hobby robotics servos may have sophisticated electronics to protect themselves from burning out, they normally have no way to alter the amount of force they will exert from any given position.
The limitation of having motions that move at pre-determined speeds to each new position can be seen, even within our culture, where there is a dance called "The Robot." The robot dance is a performance in which a human mimics a robot. It is characterized by the constant motions between each position, which are caused—in real robots—by hobby-servo limitations.
Just for completeness, and because we often get our best ideas from nature, it is probably a good idea to review how animal muscles perform their function. They are, after all, still the best linear actuator out there for their purpose.
Lynxmotion
A great source of hard-to-find small hardware and brackets. Not just for robots.
===========
Notes:
[1] - Servos are not limited to use in actuator control. The thermostat in your home, for example, is a servo system. This entry, however, is limited to discussions of actuators.
[2] - This is not entirely correct. There are two classes of hobby servos: analog, and digital. While they both use the PWM signaling scheme, the analog devices run around 50 pulses per second, while the digital devices use pulse trains of about 400 pulses per second.
Evidence for Myosin II Mediation of Short- to Long-Term Memory Formation
One of Netlab's patent-pending synapse mechanisms and structures is based loosely on a silent-synapse hypothesis of long- vs short-term memory, which both occur at the same connection-point (synapse). This has been observed for quite some time in bio
A very clear description of different types of actuators and their optimal applications! Linear actuators are simultaneously getting smaller and more powerful — maybe not the perfect fit for home DIY projects, but many new unmanned vehicles are being built using small linear actuators that can handle up to 500lbs at speeds of up to 20″ per second
 Stand Out Publishing
Stand Out Publishing




One of Netlab's patent-pending synapse mechanisms and structures is based loosely on a silent-synapse hypothesis of long- vs short-term memory, which both occur at the same connection-point (synapse). This has been observed for quite some time in bio
Tracked: Aug 31, 19:29